汉阳新闻
 公告与问询 汉阳新闻
公告与问询 汉阳新闻
| [学术] 汉阳大学Grasp组开发了应用于生医学的触觉传感器信号基础软性夹子 | ||
|---|---|---|
|
||
|
在2020年X-Corps Festival中,由郑勋镇(融合电子工学系4)、金载勋(融合电子工学系4)、徐浩俊(融合电子工学系博士研究生)组成的Grasp组获得了大奖。2020 X-Corps Festival是由韩国研究财团主管的现场针对型理工科人才培养事业,共享各研究组的研究成果,并给得到优秀成果的组颁发奖赏的活动。
▲汉阳大学Grasp组在韩国研究财团主管的2020 X-Corps Festival中取得了优秀的研究成果。该照片是为了网上竟赛预选发表而使用的资料。ⓒ郑勋镇学生
即将毕业的郑某和金某。他们为了设计毕业作品去找了融合电子工学部李尚白教授,从而开始研究了软体机器人。之后,郑某和金某接到了赞助研究费用的X-Corps事业消息,在与李教授讨论后,为了得出完成度较高的研究结果,参与了该项目。
郑某和金某进行了使医疗用夹子或手术用机器人手指像人的手指一样通过触觉来控制动作的研究。研究通过触觉传感器信号尝试了克服在无光的环境下动作有困难的现有物体识别方法。另外,金属材质的机器人手指插入人体内时,在人体内部的动作不自由,可能会造成内部损伤,用柔软的硅材质制作机器人手指以解决现有的问题。
在作为Grape组组长活动的徐某的主导下,郑某和金某从4月份开始正式开始进行了研究。他们从研究计划开始,一步一步地设计和制作了夹子、选定和插入了触觉传感器、制造了收集触觉传感器输出信号的解读集成电路、并编制了灵活的控制软性夹子和收集处理传感器信号的微型控制器代码。
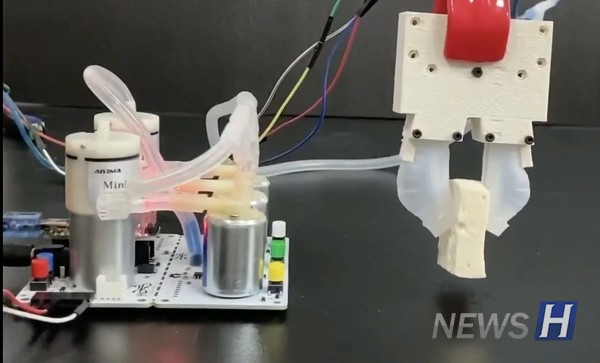
▲为了开发软性夹子而设计的研究模型。ⓒ郑勋镇学生
郑某和金某在李教授、产业体导师和组长的帮助下取得了很好的研究成果。他们以触觉传感器信号为基础,开发了可以通过气压控制动作的软性夹子,使其能够进行柔和的移动,解决了体内损伤问题。以分析单压电传感器输出信号为基础,使机器人手指可以自动识别弯曲、触摸、握力等。如果夹子上的物体滑落,设计的系统将识别到并用更大的力量进行抓握。 Grasp组以软性夹子的开发在2020 X-Corps Festival中获得了大奖。通过展示由柔软夹子自行判断并进行操作,没有任何损伤地移动了橡子凉粉和嫩豆腐,而得到了很好的评价。但是,这是用柔软的材质组成的机器人,与有骨骼的机器人相比,力量相对较弱。另外,还剩下将其缩小至可以插入人体内部大小的课题。Grasp组为了解决该问题,正在进行后续研究。 最后,郑某发表了获奖感言:“很高兴通过好的事业进行了自己想要的研究”,“希望对研究感兴趣的本科生通过这项事业,对今后的前途设定得到很大的帮助”。金某向指导的教授、组长徐某和组员郑某表示了感谢。徐某说:“在事前进行的校内HX-Corps结果发表会上取得了优秀的成果,获得了出战X-Corps Festival资格”,“感谢对研究结果给予好评的评委们”。
|
||
| 上一篇 | [学术]古敏三教授共同研究组开发了分析和舞蹈演员动作的相似度的人工智能指导系统 | |
| 下一篇 | [学生采访] 卞周永学生,首次获得“CES Innovation award”的本科生。 | |